OKO波前传感器
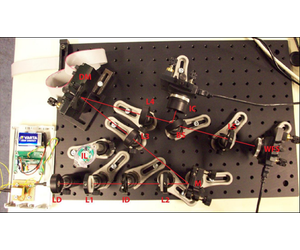
OKO波前传感器有FrontSurfer独立软件。该程序从具有任意数量的子孔径的六边形,正交或随机Hartmann-Shack掩模获得的斑点图案重建波前。该软件能够以极坐标或条形图格式实时动态显示低阶像差。在反馈模式下,程序与OKO可变形镜耦合,可用于低成本的实时自适应光学系统。
适用于Windows或Linux的FrontSurfer独立软件,该软件支持Windows和Linux上的标准视频接口。在“对准”模式下,该软件能够以极坐标或条形图格式实时动态显示低阶像差。在反馈模式下,程序与OKO可变形镜耦合,可用于低成本的实时自适应光学系统。
| 产品型号 | 相机类型 | 像素行距 | 通光孔径 | 采样点 | 重复性(RMS) | 重复性(P-V) | 扫描频率 | 闭环速度 | Zernike项数 | 光谱范围 |
|---|---|---|---|---|---|---|---|---|---|---|
| UI-2210SE | CCD | 300 um | 3.9 mm | 127 | λ/300 | λ/60 | ≥ 75 fps | 25 fps | ≤ 44 | 400~900 nm |
| UI-1540LE | CMOS | 150 um | ≤ 4.5 mm | ≤700 | λ/150 | λ/20 | ≥ 25 fps | 10 fps | ≤ 300 | 400~1000 nm |
| UI-3370CP | CMOS | 300 um | ≤9 mm | ≤700 | λ/300 | λ/60 | ≥ 80 fps | 10 fps | ≤ 300 | 400~900 nm |
| piA640-210gm | CCD | 150 um | ≤3.5 mm | ≤400 | λ/150 | λ/20 | ≥ 210 fps | 120 fps | ≤ 100 | 400~900 nm |
- 基于Shack -Hatmann原理
- 专业的FrontSurfer处理软件
- 可以定制方形,六角形,或者任意形状的S-H透镜阵列
- 多种相机可选,CCD或者CMOS
- 可以提供普通接口或者C-mount接口
- 采用速度最大可达KHz
- 适用于多种波长,从可见光到近红外