NightN波前传感器
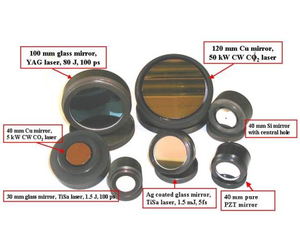
NightN波前传感器基于夏克-哈特曼原理,俄罗斯NightN主要专注设计制造复杂的自适应光学系统,适用于高功率激光(包括飞秒TW系统),自适应成像系统,天文,人眼,生物。俄罗斯NightN不仅设计制造可变形镜子,还生产波前传感器,自适应激光干涉仪,光学检测系统。
俄罗斯NightN的可变形镜,包括压电式,堆栈式,另外有一些性价比高的小型变形镜,另外可以加载水冷系统。
NightN波前传感器主要型号
| 产品型号 | 通光孔径 | 采样点 | 透镜焦距 | 空间分辨率 | 动态范围 | 精度RMS | 最小曲率半径 | ROC测量精度 |
|---|---|---|---|---|---|---|---|---|
| WFS-11.26-3.2-0.136 | 11.26 mm | 4800 | 3.2 mm | 136 μm | 185μm | 12 nm | 340 mm | 0.4 mm |
| WFS-7.03-3.2-0.136 | 7.03 mm | 1870 | 3.2 mm | 136 μm | 115μm | 12 nm | 210 mm | 0.4 mm |
| WFS-4.91-3.2-0.136 | 4.91 mm | 910 | 3.2 mm | 136 μm | 80μm | 10 nm | 150 mm | 0.5 mm |
产品性能
- 相位测量范围 – 最高15μ
- 测量精度 – λ/ 100(RMS)
- 输入光束直径 – 4 … 100 mm以上
- 工作子孔数:400
- 工作波长范围:400nm – 1100nm
- 采集频率/帧速率:高达60 Hz
- 脉冲和CW激光束诊断

硬件包括:
- Lenslet数组
- 单色CCD / CMOS相机(IEEE 1394)
- IEEE 1394电缆(6pin-6pin)
- 可选:
- 调整镜头或伸缩系统的尺寸
- 中性密度光学滤光片在支架中
- 参考波前源(准直器,一个波长的光纤耦合激光器,支架)
该软件包括:
- 圆形瞳孔或多边形掩模的波前重建
- PV的测量
- RMS的定义
- 将像差扩展到Seidel和Zernike多项式(倾斜,散焦,散光等)
- 条纹表示,2D和3D波前
- 重建强度分布
- 估计光束质量因子M²; 光束表征参数:激光光束直径,光束腰和位置,光束发散
- PSF,MTF